Seven years of competitive robotics
Our team has been creating robots for the last seven years, with much success. Here is an overview of the last seven years, click on a robot to learn more!
Gateway - Baller
Gateway (2011-2012) was our first year as a team in competitive robotics. We went to one competition and finished as alliance captains, making it to the semi-finals. While we did not see much success this year, we were able to see the potential that our team had. This competition led us to compete the following year.
The Robot:
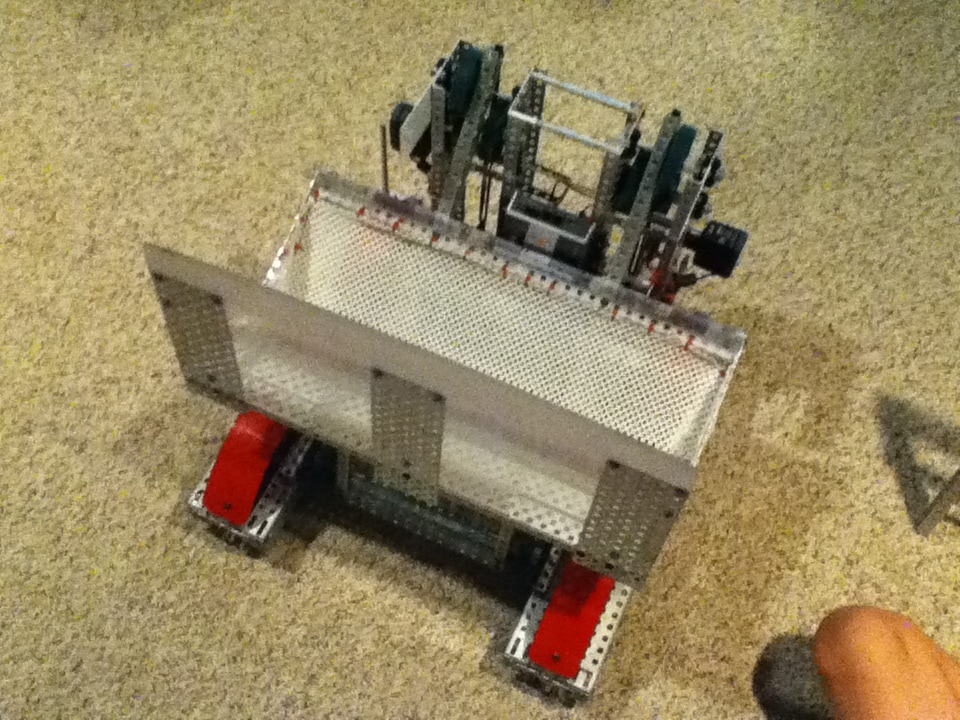
Baller was a very simple robot, using dual conveyor belts to intake and score balls and barrels into tubes. It also incorporated two vertical linear slides to raise our conveyor system high enough to score in the medium sized tubes.
The Robot:
Baller was a very simple robot, using dual conveyor belts to intake and score balls and barrels into tubes. It also incorporated two vertical linear slides to raise our conveyor system high enough to score in the medium sized tubes.
Sack Attack - Infinitizer
|
Sack Attack (2012-2013) was our second year as a team, and one of our most successful years to date. Our robot Infinitizer traveled to six tournaments, winning a total of 6 awards. Most notably, we won the Design Award at the 2013 VRC World Championships, along with getting to the finals in our division.
The Robot: Infinitizer was also a very simple robot, and was an efficient scorer and defender. We could pick up 3-4 sacks at a time using the "spatula" flipper in the front, along with depositing them into our dumper. Our dumper could hold and dump around 20 sacks at a time, along with defend them from the opposing alliance. We were small enough to get under the line of troughs in the middle of the field, but couldn't score in the high goal. |
|
Toss Up - Aegon The Conqueror
|
Toss Up (2013-2014) was our third year. This year was also one of our most successful years. Aegon The Conqueror traveled to seven tournaments, winning a total of 20 awards plus winning a 1 vs 1 Mini Tournament at the Create US Open. Most notably, we won the Excellence Award, Robot Skills, and Tournament Finalist awards at the Create US Open. We also won the Create Award at the 2014 VRC World Championships, along with captaining the 8th seed alliance.
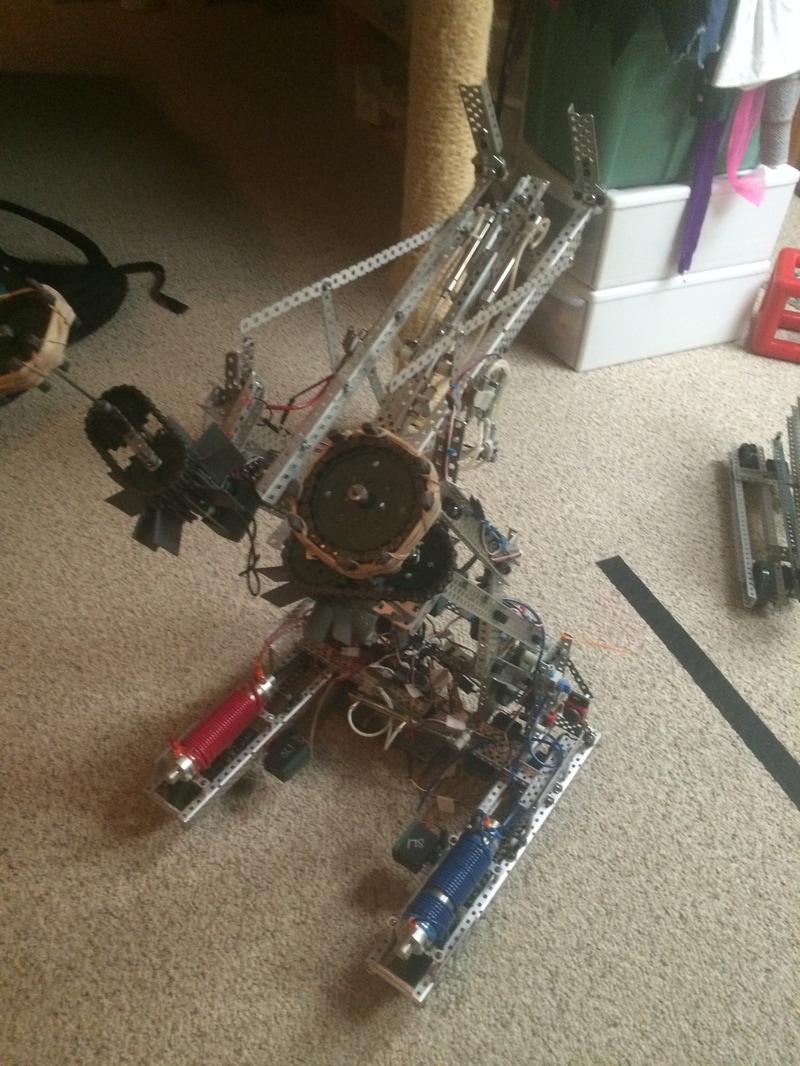
The Robot: Aegon the Conqueror was more complex compared to our previous robots, but performed extremely well. It had a 4 motor drive, 4 motor lift, and 2 single motor intake rollers that were capable of picking up and holding buckyballs and large balls. We also had a 2 piston launcher, capable of launching the large balls across the field to the opposite zone, to either score or descore them. |
Skyrise - Ziggurat
|
Skyrise (2014-2015) was our fourth year. This year, we transitioned from middle school to high school, and did not perform as well because of the much increased level of competition. Regardless, we performed well this year. Ziggurat traveled to seven competitions, winning a total of 10 awards. We placed 1st in our division at the Wisconsin State Championships, but were defeated in the division finals. We qualified and competed at the VRC World Championships through a ticket gained from programming skills at the Wisconsin State Championship.
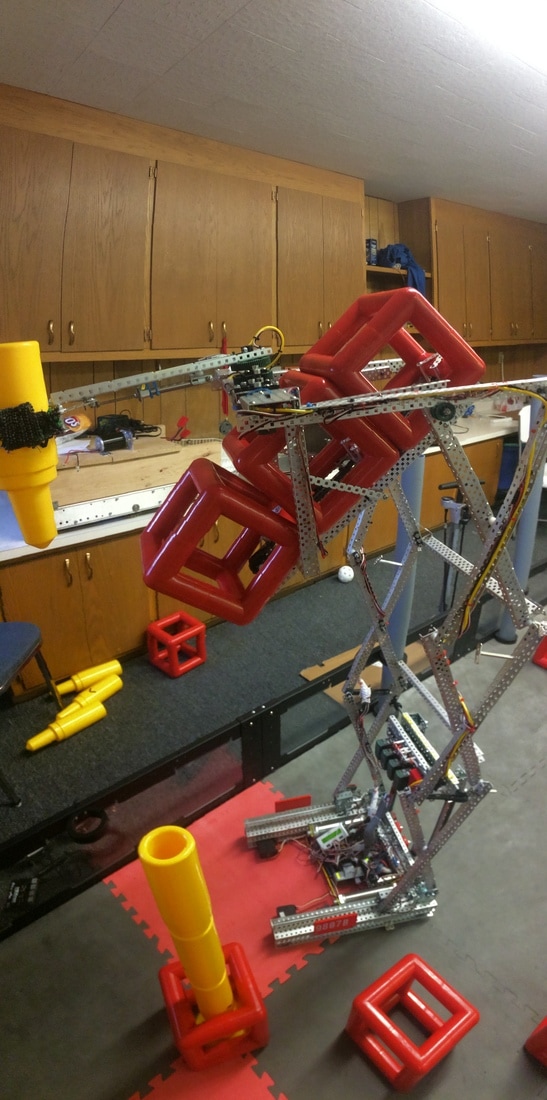
The Robot: Ziggurat was the most complicated robot built up to this point by our team. It included a 4 motor drive, a 4 motor scissor lift, a single motor cube conveyor with a 3 cube capacity, and a single motor turntable which rotated a single piston claw. We were able to make a robot that could confidently play all aspects of the game. Our scissor lift was also extremely efficient, allowing us to lift high enough to place all 7 skyrise pegs without any tension to aid our vertical extension. This lift was one of the most efficient designs we have ever seen, and we used the same design in future robots. |
|
Nothing But Net - Kobe and Smack
|
Nothing But Net (2015-2016) was our fifth year. This year was slightly different from previous years because we developed two very diverse robots. Our first robot, Kobe, was used at two tournaments and won 3 awards. Our second robot, Smack, was then used at the remaining four tournaments, winning 3 awards. Unfortunately, we did not qualify for the VRC World Championships this year, but we scored 312 in programming skills with a potential of 350 points.
The Robots: Kobe was created as our initial design to play the game. It incorporated a 4 motor flywheel, with a 4 motor base, and a 2 motor conveyor/intake system. We also had two iterations to Kobe, one including a pneumatically deployed ramp to allow our partner to high elevate, and a second iteration with a pneumatically deployed platform linked to a 4 bar. Smack was created to fix some of the problems we had in our first robots. Smack incorporated a 4 motor drive, with a 4 motor linear punching mechanism, and a 2 motor conveyor/intake mechanism. This robot also went through several iterations. The first iteration was developed from the final iteration of Kobe, and it included the pneumatically deployed platform for elevation, a pneumatic angle adjusting plate for various shooting angles, and a fast and efficient linear punching mechanism. The second iteration of Smack removed the lifting mechanism and adjusting launch plate, but added a two speed drive transmission, from torque to speed gear ratios. The final iteration of Smack was made specifically for the skills challenges, and removed the drive shifting mechanism from earlier and mainly focused on the linear punch and ball loading mechanism. |
Starstruck - Daedalus, Scorpion, and UNNAMED
|
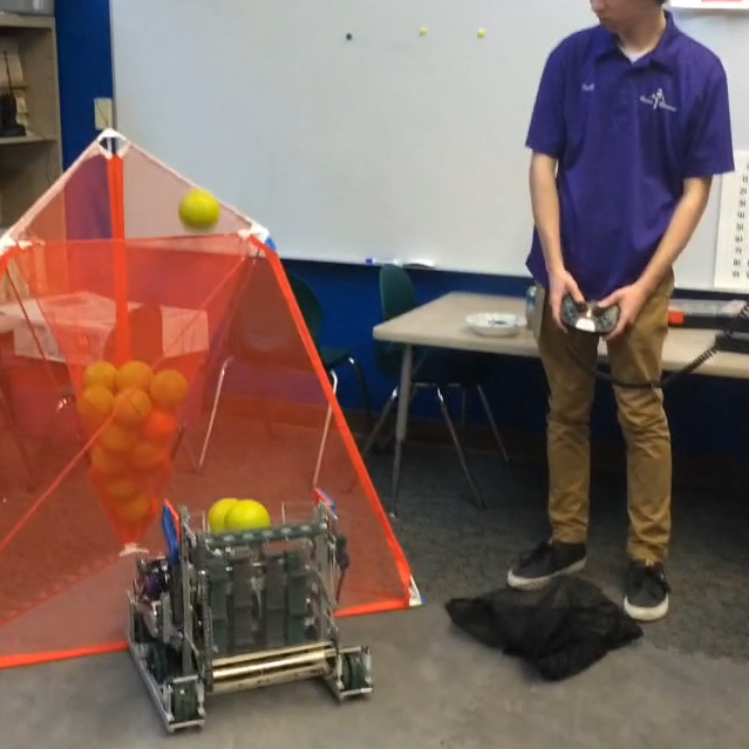
Starstruck (2016-2017) is our current competition, and our 6th year in VEX Robotics. So far this year, we have developed three very diverse robots to compete with. Our first robot, Daedalus, competed at one competition in Illinois. We captained the 8th seed alliance, but did not win any awards. We created Scorpion to include the positive traits of Daedalus, while adding completely new features to allow our strategy to be much more dynamic. Scorpion also competed at one competition, along with a scrimmage for the Wisconsin PLTW Conference. With Scorpion, we captained the 7th seed and were unable to win any awards. Our third robot of the season is still being used in competition, and has been present at two competitions now, winning 4 total award.
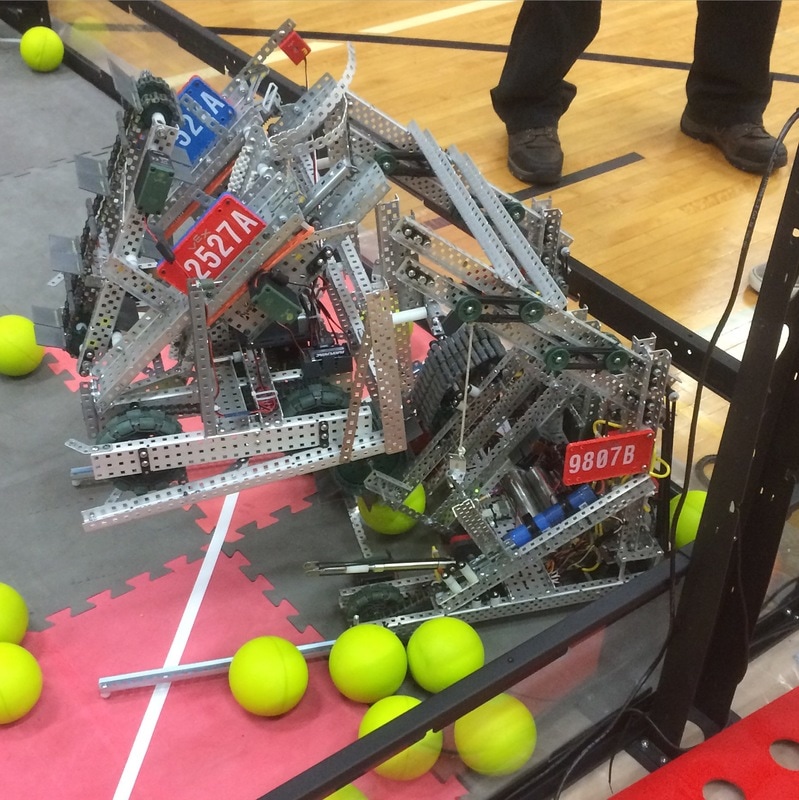
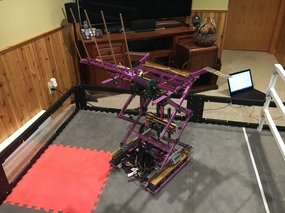
The Robots: Daedalus was another one of the most complicated robots that we have ever built, consisting of various designs similar to those we have used in the past. Daedalus used a 5 motor H-drive with a 3 motor scissor lift and a 4 motor slip gear catapult. We incorporated our scissor lift from skyrise onto Daedalus, but due to the extremely high efficiency of our design we were able to remove a motor from the lift while keeping efficiency, even without any tension to aid vertical extension. Daedalus also incorporated a slip gear catapult, similar to the slip gear linear punch used in Nothing But Net. At the end of the catapult mounted a standoff intake, capable of holding 1-2 stars easily, along with launching them across the fence with a reloading time of 1-1.5 seconds. Scorpion was similar to Daedalus with the launching mechanism, but instead of mounting to a scissor lift, the launching mechanism was mounted directly to the base. We also changed the drive from Daedalus, changing the 5 motor H-drive to a 6 motor tank drive. We used 6 turbo motors on the base to allow us to swiftly navigate the field, and respond much faster to what our opponents are doing. Scorpion also included two grabber arms in the front, powered by 1 piston each to hold the stars and cubes in our intake as we drove around the field. Originally, Scorpion had a tail that passively engaged to our launching mechanism for hanging, but this tail snapped off at the PLTW Scrimmage. Our third, and current robot has done very well this year, and it continues to improve. Currently, we are looking at getting 114 in robot skills, but we can improve to get more. We will release more on our current robot as it becomes closer to our state championship! |

|
